
We use the tools of biomechanics and functional morphology to study how animals move. Among vertebrates, the mechanical behavior of muscles, tendons, and bones is quite conserved at the tissue and cellular levels. The diversity of locomotor performance results in large part from the arrangement and interaction of these components. Our research group investigates the integrated function of muscles, tendons, and skeletal lever systems to better understand the evolution of musculoskeletal design.

Elastic Mechanisms in Locomotion
Muscles power animal movement, but it has become increasingly clear that the spring-like actions of structures associated with muscles, such as tendons, are essential for producing movements that are fast, cheap, and safe. We study the action of these spring-like elements in a wide range of animals and actions, including jumping, landing, and sound production. Our study animals are varied, as are our tools, including methods from the fields of muscle physiology, biomechanics, and functional morphology.
Diversity of Muscle-Powered Systems
Skeletal muscles perform a wide variety of mechanical tasks and they do it with a wonderful diversity of musculoskeletal arrangements. We seek to use this diversity to understand the evolution of musculoskeletal structures in vertebrates, and how the relationship between muscle contractile properties, skeletal morphology, and muscular arrangements shape performance.

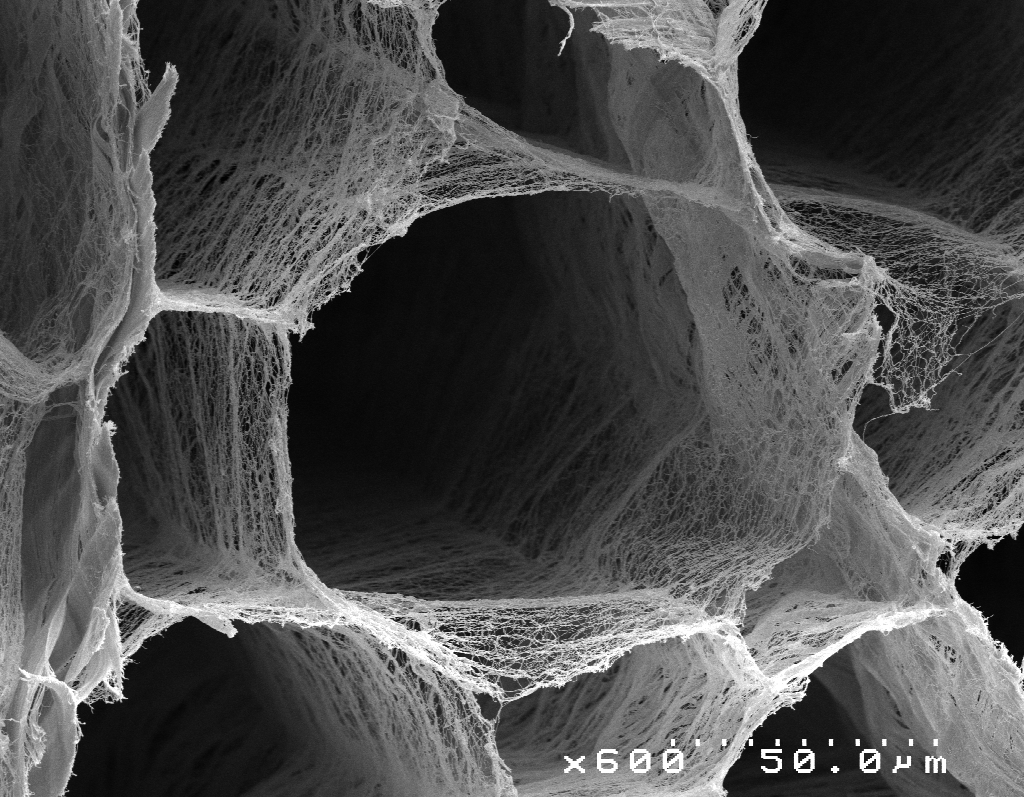
Multiscale Muscle Function
Sarcomeres are the “functional unit” at the heart of muscle force development, but can muscles be modeled as simply scaled-up sarcomeres? Increasingly, evidence suggests that the force and speed of muscle contraction is shaped by mechanical interactions among structures within muscles (e.g., fluid, collagenous extracellular matrix). From this interaction emerge principles of muscle mechanics that aren’t predicted from a sarcomere-based view of muscle. We use simple models, isolated muscle experiments, and morphological studies to reveal the multi-scale nature of muscle contraction.

Muscles as Inspiration for Engineered Devices
As actuators, muscles are soft, efficient, powerful and quiet. Muscle action depends on multi-scale interactions of hierarchical structures. These features set muscle apart from most engineered actuators. We seek to provide inspiration from principles of muscle structure and function for the design of soft robotic actuators.